2 - Technology
# Different types of technology in autonomous vehicle:
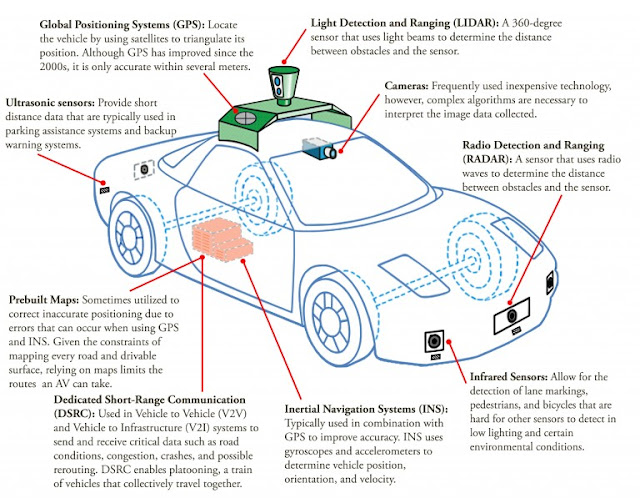
Autonomous Vehicles (AVs) use combinations of technologies and sensors to sense the roadway, other vehicles, and objects on and along the roadway.The key technologies and sensors are described in the figure below.
 * A combination of sensors:
* A combination of sensors:




http://www.oxts.com/what-is-inertial-navigation-systems-guide/
https://www.quora.com/What-sensors-do-driverless-cars-have
http://www.thedrive.com/tech/8657/heres-how-the-sensors-in-autonomous-cars-work
Autonomous Vehicles (AVs) use combinations of technologies and sensors to sense the roadway, other vehicles, and objects on and along the roadway.The key technologies and sensors are described in the figure below.

Cameras are a relatively inexpensive type of sensor that can
provide the basic visual information a human would gather as he or she drive;
multiple cameras are used to provide depth of field.
Radar (Radio detection and ranging) already used for certain level 1 vehicle controls;
Lidar (light detection and ranging) is an onboard laser
system that maps a car’s surroundings as it moves. You are probably familiar
with LIDAR as the big spinning unit found on the top of most of Google’s test
vehicles; solid-state LIDAR does not require spinning and is also being used in
some autonomous vehicles now being developed. Although LIDAR creates highly
accurate 3D mapping, it does have drawbacks; in addition to being very
expensive, the technology is affected by weather, with its signal bouncing off
of rain or snow.
Ultrasonic sensor: is a device that can measure the distance to an object by using sound waves. It measures distance by sending out a sound wave at a specific frequency and listening for that sound wave to bounce back. By recording the elapsed time between the sound wave being generated and the sound wave bouncing back, it is possible to calculate the distance between the sonar sensor and the object.
* A combination of localization:
GPS (Global Positioning Systems): Locate the vehicles by using satellites to triangulate its position. Althoug GPS has improved since 2000, it is only accurates within several meters.
INS ( Inertial NAvigaiton Systems): Inertial navigation systems come in all shapes and sizes. The sensors an INS uses are typically gyroscopes to measure rotation and accelerometers to measure velocity—and there are normally several of each inside. We'll look at how an INS actually works in a moment, for now the most important thing to realise is how inertial guidance systems differ from GPS—which you're probably more familiar with.
*Reference sources:
http://css.snre.umich.edu/factsheets/autonomous-vehicles-factsheet
http://education.rec.ri.cmu.edu/content/electronics/boe/ultrasonic_sensor/1.htmlhttp://www.oxts.com/what-is-inertial-navigation-systems-guide/
https://www.quora.com/What-sensors-do-driverless-cars-have
http://www.thedrive.com/tech/8657/heres-how-the-sensors-in-autonomous-cars-work
# Sensors Greater detail:
Sensor Technology
|
Being used
|
Benefits
|
Drawbacks
|
Future potential
|
Cameras
|
Generate images of vehicles’ surroudings, imitating human eyesight. They
are also even capable of 3D vision – allowing for range determination. The most
advanced camera systems do not only detect obstacles but also identify them
and predict their immediate trajectories using advanced algorithms.
|
Detect color and font – and are therefore able to interpret traffic
signs, traffic lights, or lane markings. They can also act as a back-up
system should other systems fall – increasing the car’s system security
|
Weather limitation such as fog, rain, or a low sun currently increase
the risk of failures and need to be overcome.
|
More different sizes, appearance and new functions that help them
work in all kinds of weather.
|
Radar
|
Known from ship and plane navigation. Radar sensors send out
electromagnetic waves. If they hit an obstacles, the waves are reflected,
revealing how far away an object is and how fast it is approaching. The
radar’s input may even engage advanced steering and braking controls to
prevent the crash.
|
Track the speed of other vehicles in real time. They also contribute
to the safety by increasing the redundancy of autonomous vehicles systems
|
Radar is only good at close range. Current 2D radar are not able to
determine an object’s height as they only scan horizontally. This can cause
problems, for instance when driving under a bridge.
|
Radars will provide more accurate information, be smaller, cheaper
and more reliable.
|
Lidar
|
Scan the environment with a non-visible laser beam. The low
intensity, non-harmful beam visualizes objects and measures ranges-creating a
3D image of the car’s environment.
|
Combined with the data of camera sensors, Lidar sensors allow
obstacles to be accurately identified – for instance whether it is a vehicle
or a pedestrian that is in front of the car.
|
Lidar sensors are currently much more expensive than radar sensors.
|
In future, with solid-state technology coming in, the cost will come
down drastically making LiDARs indispensable for any AV.
|
Ultrasonic sensor
|
Imitating the navigation process of bats, ultrsonic sensors send out
waves. When the waves hit an object the produce echoes – revealing the exact
location of the obstacle.
|
Detect obstacles in the immediate vicinity – be it cars, pedestrians
or bollards. They play an important role for automated parking.
|
Ultrasonic sensors can only be used at very low speeds.
|
They serve their intended purpose and there is currently no further
development needed
|
Comments
Post a Comment